











 Edmund Richardson
Edmund Richardson 0
0  2161
2161 138
138
Simultánní lokalizace a mapování (SLAM) pravděpodobně není fráze, kterou používáte každý den. Několik nejnovějších technologických zázraků však tento proces používá každou milisekundu své životnosti.
Co je SLAM? Proč to potřebujeme? O čem jsou tyto skvělé technologie??
Od zkratky po abstraktní myšlenku
Tady je rychlá hra pro vás. Který z nich nepatří?
- Auta s vlastním pohonem
- Rozšířená realita aplikace
- Autonomní letecká a podvodní vozidla
- Kombinovaná realita nositelná
- The Roomba
Možná si myslíte, že odpověď je snadno poslední položkou v seznamu. Svým způsobem máte pravdu. Jinak to byla triková hra, protože všechny tyto položky spolu souvisejí.
 Obrázek Kredit: Nathan Kroll / Flickr
Obrázek Kredit: Nathan Kroll / Flickr
Skutečnou otázkou (velmi cool) hry je toto: Co dělá všechny tyto technologie proveditelné? Odpověď: současná lokalizace a mapování, nebo SLAM! jak to říkají skvělé děti.
Obecně je účel algoritmů SLAM dostatečně snadný na iteraci. Robot použije současnou lokalizaci a mapování k odhadu své polohy a orientace (nebo pozice) v prostoru při vytváření mapy svého prostředí. To umožňuje robotovi zjistit, kde se nachází a jak se pohybovat v neznámém prostoru.
Proto ano, to znamená, že celý tento efektní algoritmus smíchu je odhad polohy. Další populární technologie, Global Positioning System (nebo GPS) Jak funguje GPS Tracking a co s ním můžete sledovat? Jak funguje sledování GPS a co s ním můžete sledovat? GPS. Známe to jako technologii, která nás vede z bodu A do bodu B. GPS je však víc než to. Existuje svět možností a nechceme, aby vám unikla. odhaduje postavení od první války v Zálivu v 90. letech.
Rozlišování mezi SLAM a GPS
Tak proč potřeba nového algoritmu? GPS má dva vlastní problémy. Zaprvé, zatímco GPS je přesný vzhledem k celosvětovému měřítku, jak přesnost, tak i přesnost zmenšují měřítko vzhledem k místnosti, stolu nebo malé křižovatce. GPS má přesnost až na metr, ale co centimetr? Milimetr?
Za druhé, GPS nefunguje dobře pod vodou. Tím myslím, že vůbec ne. Podobně je výkon skvrnitý uvnitř budov se silnými betonovými stěnami. Nebo v suterénu. Získáte nápad. GPS je satelitní systém, který trpí fyzickými omezeními.
Algoritmy SLAM mají tedy za cíl poskytnout vylepšený pocit pozice pro naše nejpokročilejší gadgety a stroje.
Tato zařízení již mají litanii senzorů a periferií. Algoritmy SLAM využívají data z co nejvíce z nich pomocí matematiky a statistiky.
Kuře nebo vejce? Pozice nebo mapa?
Matematika a statistika jsou potřebné k zodpovězení složité quandary: je pozice používaná k vytvoření mapy okolí nebo je mapa okolí používána k výpočtu polohy?
Myšlenková doba experimentu! Jste mezidimenzionálně pokřivení na neznámé místo. Co děláš první věc? Panika? Dobře, uklidni se, nadechni se. Vezměte další. Jaká je druhá věc, kterou děláte? Rozhlédněte se kolem a pokuste se najít něco známého. Židle je vlevo. Rostlina je po vaší pravici. Konferenční stolek je před vámi.
Další, jednou paralyzující strach “Kde jsem sakra já?” opotřebuje se, začnete se pohybovat. Počkejte, jak funguje pohyb v této dimenzi? Udělejte krok vpřed. Židle a rostlina se zmenšují a stůl se zvětšuje. Nyní můžete potvrdit, že se ve skutečnosti pohybujete kupředu.
Pozorování jsou klíčem ke zlepšení přesnosti odhadu SLAM. Ve videu níže, jak se robot pohybuje ze značky na značku, vytváří lepší mapu prostředí.
Zpět do jiné dimenze, čím více procházíte, tím více se orientujete. Krok ve všech směrech potvrzuje, že pohyb v této dimenzi je podobný vaší domovské dimenzi. Když jdete doprava, rostlina se zvětšuje. Naštěstí vidíte další věci, které v tomto novém světě identifikujete jako orientační body a které vám umožní sebevědomější putování.
Toto je v podstatě proces SLAM.
Vstupy do procesu
Aby bylo možné provést tyto odhady, algoritmy používají několik údajů, které lze klasifikovat jako interní nebo externí. Jako příklad interdimenzionálního transportu (přiznávejte, měli jste zábavnou cestu) jsou vnitřní měření velikost kroků a směru.
Provedená externí měření jsou ve formě obrázků. Identifikace orientačních bodů, jako je rostlina, židle a stůl, je pro oči a mozek snadným úkolem. Nejvýkonnější známý procesor - lidský mozek - je schopen tyto snímky pořídit a nejen identifikovat objekty, ale také odhadnout vzdálenost k tomuto objektu..
Bohužel (nebo naštěstí v závislosti na vašem strachu z SkyNet) roboti nemají jako procesor lidský mozek. Stroje spoléhají na silikonové čipy s lidským psaným kódem jako mozkem.
Ostatní kusy strojů provádějí externí měření. K tomu jsou užitečné periferní zařízení, jako jsou gyroskopy nebo jiná inerciální měřící jednotka (IMU). Roboti, jako jsou automobily s vlastním pohonem, používají také jako vnitřní měření odometrii polohy kola.
 Obrázek Kredit: Jennifer Morrow / Flickr
Obrázek Kredit: Jennifer Morrow / Flickr
Externě, vůz s vlastním řízením a další roboti používají LIDAR. Podobně jako radar využívá rádiových vln, LIDAR měří odražené světelné impulzy pro identifikaci vzdálenosti. Používané světlo je obvykle ultrafialové nebo téměř infračervené, podobné infračervenému hloubkovému senzoru.
LIDAR vysílá desítky tisíc impulsů za sekundu, aby vytvořil trojrozměrnou bodovou cloudovou mapu s vysokým rozlišením. Takže, příště, až se Tesla otočí na autopilotu, střílí vás laserem. Hodněkrát.
Algoritmy SLAM navíc používají statické obrazy a techniky počítačového vidění jako externí měření. To se provádí pomocí jediné kamery, ale lze ji ještě zpřesnit stereofonním párem.
Uvnitř černé skříňky
Interní měření aktualizuje odhadovanou polohu, kterou lze použít k aktualizaci externí mapy. Externí měření aktualizuje odhadovanou mapu, kterou lze použít k aktualizaci polohy. Můžete to považovat za inferenční problém a myšlenkou je najít optimální řešení.
Běžným způsobem, jak toho dosáhnout, je pravděpodobnost. Techniky jako přibližná poloha filtru částic a mapování pomocí Bayesovské statistické inference.
Filtr částic používá stanovený počet částic rozptýlených Gaussovou distribucí. Každá částice “předpovídá” aktuální pozice robota. Každá částice je přiřazena pravděpodobnost. Všechny částice začínají se stejnou pravděpodobností.
Když se provádějí měření, která se navzájem potvrzují (například krok vpřed = zvětšení tabulky), pak částice, které jsou “opravit” v jejich pozici se postupně dostávají lepší pravděpodobnosti. Částicím, které jsou daleko, jsou přiřazeny nižší pravděpodobnosti.
Čím více památek dokáže robot identifikovat, tím lépe. Orientační body poskytují zpětnou vazbu k algoritmu a umožňují přesnější výpočty.
Aktuální aplikace využívající algoritmy SLAM
Pojďme to rozbít, cool kus technologie cool kus technologie.
Autonomní podvodní vozidla (AUV)
Bezpilotní ponorky mohou pracovat autonomně pomocí technik SLAM. Interní IMU poskytuje data zrychlení a pohybu ve třech směrech. Navíc AUV používají pro odhad hloubky sonar směřující zdola. Sonar s bočním snímáním vytváří obrazy mořského dna s dosahem několika set metrů.
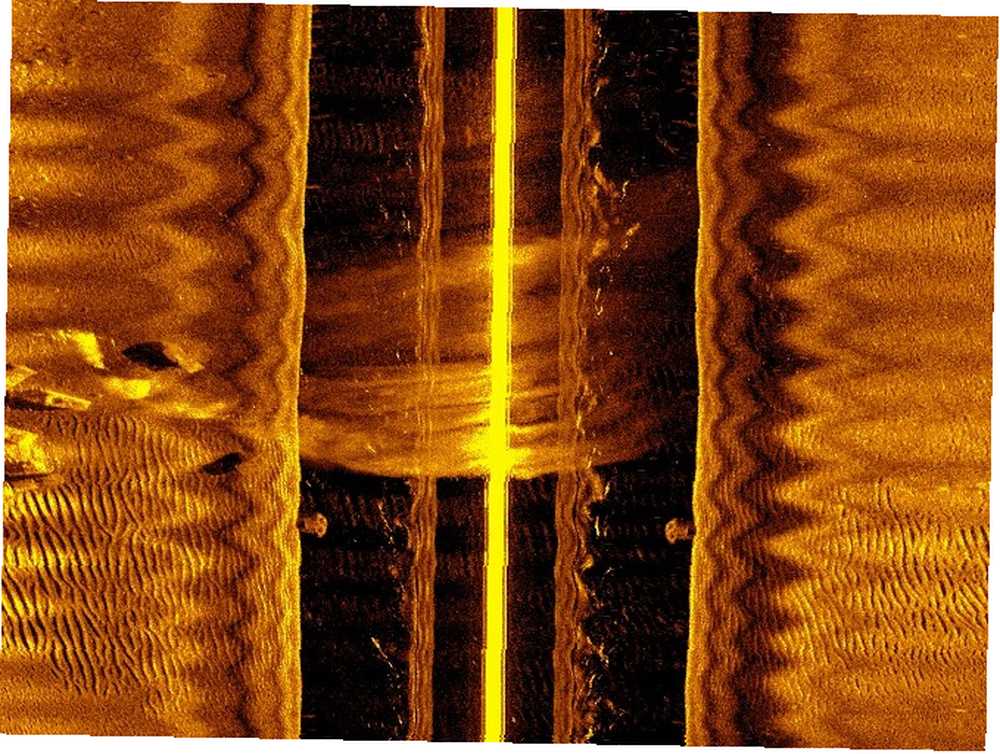 Obrazový kredit: Florida Sea Grant / Flickr
Obrazový kredit: Florida Sea Grant / Flickr
Smíšené reality nošení
Microsoft a Magic Leap vytvořili nositelné brýle, které představují aplikace Smíšená realita Windows Smíšená realita: Co to je a jak to vyzkoušet Windows Smíšená realita: Co to je a jak to vyzkoušet Windows Smíšená realita je nová funkce, která vám umožní používat Windows 10 ve virtuální a rozšířené realitě. Zde je důvod, proč je to vzrušující a jak zjistit, zda je váš počítač podporuje. . Pro tyto nositelné nosiče je rozhodující odhad polohy a vytvoření mapy. Zařízení používají mapu k umístění virtuálních objektů na skutečné objekty a jejich interakci.
Protože tyto nositelné prvky jsou malé, nemohou používat velká periferní zařízení, jako je LIDAR nebo sonar. Místo toho se pro mapování prostředí používají menší infračervené hloubkové senzory a kamery směřující ven.
Auta s vlastním pohonem
Autonomní auta mají oproti nositelným vozům trochu výhodu. S mnohem větší fyzickou velikostí mohou auta pojmout větší počítače a mít více periferií k provádění interních a externích měření. V mnoha ohledech představují automobily s vlastním pohonem budoucnost technologie, pokud jde o software i hardware.
Technologie SLAM se zlepšuje
Technologie SLAM je používána mnoha různými způsoby, je to jen otázka času, než bude zdokonalena. Jakmile jsou autosedačky (a další vozidla) vidět každý den, budete vědět, že současná lokalizace a mapování je připraveno pro každého k použití.
Technologie s vlastním pohonem se zlepšuje každý den. Chcete vědět více? Podívejte se na podrobné členění MakeUseOf o tom, jak fungují autovraky. Jak fungují autovraky: Matice a šrouby za autonomním programem Google Jak autovraky fungují: Matice a šrouby za autonomními autosady společnosti Google Možnost dojíždět zpět a dále pracovat, zatímco spíte, jíte nebo doháníte své oblíbené blogy, je koncept, který je stejně přitažlivý a zdánlivě vzdálený a příliš futuristický, než aby se skutečně stal. .
Obrázek Kredit: chesky_w / Depositphotos